Столкнулся с двумя проблемами. Не понятно, особенности блока такие или что-то неправильно делаю.
1. При смене сигнала на входе CCW направление вращение не меняется до выключения и включения контроллера. Например, на CCW подается 1 и двигатель вращает по часовой стрелке. Меняю на 0, двигатель продолжает вращать по часовой стрелке. Значение направления записывается в EEPROM. Если выключить и включить контроллер, то начинает вращать против часовой стрелки, как и должно быть. В обратном направлении тоже самое. В чем может быть проблема?
2. Двигатель вращает поворотный стол. Количество шагов ШД для оборота стола на 360 градусов почему то отличается от направления вращения. По часовой стрелке надо меньше шагов (примерно на 200), чем против часовой. Это нормально?
Шаговый двигатель на GyverStepper
Правила форума
Рекомендации по размещению блоков:
Автор блока создает подробное описание блока, отличие от подобных(если есть на данный момент).Сложные блоки очень желательно с примерами.
При выходе новых версий редактирует/дополняет свой первый пост с указанием даты, версии, причины.
В каждой теме обсуждается только выложенный автором блок - баги, возможность (или предложение) доработки и прочие хотелки.
Свои блоки, переработанные, с другими библиотеками, протоколами и т.д.- размещаем либо сами отдельно, либо обсуждаем и дорабатываем в форуме Разработка блоков.
Пользователи улучшив блок автора и проверив его работоспособность - могут обратиться к автору или модераторам с просьбой добавить их версию блока в первое сообщение темы.
Рекомендации по размещению блоков:
Автор блока создает подробное описание блока, отличие от подобных(если есть на данный момент).Сложные блоки очень желательно с примерами.
При выходе новых версий редактирует/дополняет свой первый пост с указанием даты, версии, причины.
В каждой теме обсуждается только выложенный автором блок - баги, возможность (или предложение) доработки и прочие хотелки.
Свои блоки, переработанные, с другими библиотеками, протоколами и т.д.- размещаем либо сами отдельно, либо обсуждаем и дорабатываем в форуме Разработка блоков.
Пользователи улучшив блок автора и проверив его работоспособность - могут обратиться к автору или модераторам с просьбой добавить их версию блока в первое сообщение темы.
-
AlexCrane

- Капитан
- Сообщения: 903
- Зарегистрирован: 20 окт 2017, 13:22
- Откуда: Ульяновск
- Имя: Александр
- Поблагодарили: 12 раз
Шаговый двигатель на GyverStepper
Поставьте последнюю версию v2.6.3 - reverse() в step-dir драйвере теперь применяется сразуAxel писал(а): 24 апр 2023, 01:10 1. При смене сигнала на входе CCW направление вращение не меняется до выключения и включения контроллера
Это не нормально. Возможно в проекте что-то не так.
Если не знаю, то не скажу. Если скажу, то сначала проверю...
Если нет возможности отблагодарить материально, хотя бы оцени пост....
Если нет возможности отблагодарить материально, хотя бы оцени пост....
-
Rovki

- Полковник
- Сообщения: 5748
- Зарегистрирован: 22 апр 2016, 17:25
- Откуда: Чехов
- Имя: Анатолий
- Благодарил (а): 69 раз
- Поблагодарили: 225 раз
- Контактная информация:
Шаговый двигатель на GyverStepper
Подскажите есть ли где блоки для работы с ШД (3 шт) на базе ESP8266(32)- управление драйвером (step/dir) , спасибо ?
Электронщик до мозга костей и не только
-
MihailK
- Сержант
- Сообщения: 147
- Зарегистрирован: 05 дек 2020, 23:42
- Имя: Михаил
- Поблагодарили: 3 раза
Шаговый двигатель на GyverStepper
это не блоки, но 3 двигателя к ESP подключают https://myrobotlab.org/content/esp-wroo ... 7-steppers
-
Rovki
- Полковник
- Сообщения: 5748
- Зарегистрирован: 22 апр 2016, 17:25
- Откуда: Чехов
- Имя: Анатолий
- Благодарил (а): 69 раз
- Поблагодарили: 225 раз
- Контактная информация:
Шаговый двигатель на GyverStepper
Спасибо, но это не совсем то ,что нужно . Драйверы ШД другие (промышленные , step\dir)MihailK писал(а): 11 июн 2023, 01:04это не блоки, но 3 двигателя к ESP подключают https://myrobotlab.org/content/esp-wroo ... 7-steppers
Электронщик до мозга костей и не только
-
MihailK
- Сержант
- Сообщения: 147
- Зарегистрирован: 05 дек 2020, 23:42
- Имя: Михаил
- Поблагодарили: 3 раза
Шаговый двигатель на GyverStepper
промышленными народ управляет ПК +mach3 (или аналогичная программа)+LPT плата 500руб
Шаговый двигатель на GyverStepper
Установил Ваш блок, скаченный по ссылке в шапке, и у меня он вот такой.
Меня заинтересовал GyverStepper большим функционалом, нежели у AccelStepper 0_о
А где он весь? =)
Название блока отличается, но это тот, что в ссылке прямо под описанием.
Библиотеки я в IDE установил. Может еще что-то надо в саму FLProg добавить, чтобы блок был полным по функционалу?
Меня заинтересовал GyverStepper большим функционалом, нежели у AccelStepper 0_о
А где он весь? =)
Название блока отличается, но это тот, что в ссылке прямо под описанием.
Библиотеки я в IDE установил. Может еще что-то надо в саму FLProg добавить, чтобы блок был полным по функционалу?
-
shpuntic48
- Рядовой
- Сообщения: 25
- Зарегистрирован: 26 июн 2020, 07:17
- Откуда: Khabarovsk
- Имя: михаил
Шаговый двигатель на GyverStepper
Подключи все режимы и будет полный функционал
У вас нет необходимых прав для просмотра вложений в этом сообщении.
Шаговый двигатель на GyverStepper
А х ты жЪ! Прокрутить надо было 
Не сталкивался еще с окном настроек модуля, у которого список спрятанный, потому не заметил полоску прокрутки
Благодарю и извиняюсь за тупняк свой. Я, по сути, на момент написания всего несколько часов юзал программу и познакомился с FLProg по причине срочной реализации одного простенького станка на одном шаговике.
Постараюсь самостоятельно разобраться, но если опять упрусь - можно за оплату получить помощь? Просто этот станок на производстве нужен поскорее. Механика уже готова давно и я уже 2 недели мыкаюсь в попытках написать программу его работы, ибо не проггер.
Не сталкивался еще с окном настроек модуля, у которого список спрятанный, потому не заметил полоску прокрутки
Благодарю и извиняюсь за тупняк свой. Я, по сути, на момент написания всего несколько часов юзал программу и познакомился с FLProg по причине срочной реализации одного простенького станка на одном шаговике.
Постараюсь самостоятельно разобраться, но если опять упрусь - можно за оплату получить помощь? Просто этот станок на производстве нужен поскорее. Механика уже готова давно и я уже 2 недели мыкаюсь в попытках написать программу его работы, ибо не проггер.
Шаговый двигатель на GyverStepper
Рискну, все таки, описать алгоритм, который мне нужен. Если есть возможность - помогите с учетом того, что я новичок. Понимаю, что не фиг лезть в сложные задачи, пока в основах не разобрался. Рад бы, но этот простой станок надо было сделать еще 2 недели назад, ибо другой дорогущий станок простаивает, в который все бабки вбухали почти и к которому данный мини станок необходим на завершающем этапе производства товара.
Алгоритм таков:
У станка всего одна ось, по которой бегает голова с зеркалом и линзой от парковки до конца рабочей области в 2,5 метра, после чего сразу обратно до парковки. То есть один такой цикл туда-сюдашный, который запускается кнопкой "Старт". Сам шаговик в данном алгоритме первую половину крутится против часовой, вторую по часовой. Если это усложняет, то не проблема в конструкции его перевернуть.
Все это с ускорением/замедлением, потому как требуется большая скорость движения головы. Это, собственно, и есть алгоритм работы.
Так же есть две кнопки для юстировки зеркал станка, по которым шаговик крутится в одну сторону и в другую. Соответственно две кнопки - "Лево" против часовой до отпускания, "Право" по часовой до отпускания.
При включении станка шаговик должен без ускорения крутиться против часовой на пару оборотов, после чего сразу по часовой до контакта с концевиком парковки. После этого уже ждать запуска, описанного в начале, алгоритма по кнопке "Старт".
Если необходима оплата за разработку такой программы, напишите, плз, сколько. У меня уже не сил, не времени не осталось на мучения и попытки разобраться, которые у меня пол месяца длятся без толку =/ Если указанная сумма будет приемлемой в нашей ситуации, без проблем, в противном случае так и придется самому.
Алгоритм таков:
У станка всего одна ось, по которой бегает голова с зеркалом и линзой от парковки до конца рабочей области в 2,5 метра, после чего сразу обратно до парковки. То есть один такой цикл туда-сюдашный, который запускается кнопкой "Старт". Сам шаговик в данном алгоритме первую половину крутится против часовой, вторую по часовой. Если это усложняет, то не проблема в конструкции его перевернуть.
Все это с ускорением/замедлением, потому как требуется большая скорость движения головы. Это, собственно, и есть алгоритм работы.
Так же есть две кнопки для юстировки зеркал станка, по которым шаговик крутится в одну сторону и в другую. Соответственно две кнопки - "Лево" против часовой до отпускания, "Право" по часовой до отпускания.
При включении станка шаговик должен без ускорения крутиться против часовой на пару оборотов, после чего сразу по часовой до контакта с концевиком парковки. После этого уже ждать запуска, описанного в начале, алгоритма по кнопке "Старт".
Если необходима оплата за разработку такой программы, напишите, плз, сколько. У меня уже не сил, не времени не осталось на мучения и попытки разобраться, которые у меня пол месяца длятся без толку =/ Если указанная сумма будет приемлемой в нашей ситуации, без проблем, в противном случае так и придется самому.
-
Rovki
- Полковник
- Сообщения: 5748
- Зарегистрирован: 22 апр 2016, 17:25
- Откуда: Чехов
- Имя: Анатолий
- Благодарил (а): 69 раз
- Поблагодарили: 225 раз
- Контактная информация:
Шаговый двигатель на GyverStepper
Я про такие и аналогичные https://aliexpress.ru/item/100500235780 ... 4aa60Zna5L
на Нано работают не плохо, хотелось бы и на ESP32 сделать
Электронщик до мозга костей и не только
-
AlexCrane
- Капитан
- Сообщения: 903
- Зарегистрирован: 20 окт 2017, 13:22
- Откуда: Ульяновск
- Имя: Александр
- Поблагодарили: 12 раз
Шаговый двигатель на GyverStepper
Обновил версию блока для ШД. Убрал старые болячки. Теперь корректно работает. Прошу протестировать.
Попробуйте этот блок на ESP32 (мне интересно он вообще работает? Или убрать из блока поддержку этого МК)
Попробуйте этот блок на ESP32 (мне интересно он вообще работает? Или убрать из блока поддержку этого МК)
У вас нет необходимых прав для просмотра вложений в этом сообщении.
Если не знаю, то не скажу. Если скажу, то сначала проверю...
Если нет возможности отблагодарить материально, хотя бы оцени пост....
Если нет возможности отблагодарить материально, хотя бы оцени пост....
-
AlexCrane
- Капитан
- Сообщения: 903
- Зарегистрирован: 20 окт 2017, 13:22
- Откуда: Ульяновск
- Имя: Александр
- Поблагодарили: 12 раз
Шаговый двигатель на GyverStepper
[ref]LForest[/ref], На каком МК и какие скорости нужны?
Если не знаю, то не скажу. Если скажу, то сначала проверю...
Если нет возможности отблагодарить материально, хотя бы оцени пост....
Если нет возможности отблагодарить материально, хотя бы оцени пост....
Шаговый двигатель на GyverStepper
Контроллер DM542 (микрошаг 400)
ШД NEMA 23HS6602 униполярный, но использую как биполярный. Вроде как центральные отводы обмоток надо на GND цеплять, но я не рискнул. И вообще не знаю, можно ли подключать униполярные к данному драйверу. В Вашем модуле ШД1_v1.3 есть варианты UNI, но в них управление идет через 4 пина, тогда как у драйвера только два управляющих PUL и DIR.
Скорость 8000. Подобрал ее на модуле ШД1_v1.3. Почему-то на модуле ШД AlexGrane GyverLIB уже после 3500 клинит, а на этом клинит после 8000. Может это уже ограничение Arduino Uno и надо взять мегу, к примеру?
Если честно даже этой скорости маловато, в иделе 25 об/с. Про биполярные написано, что их можно раскручивать до 1500 об/м.
У вас нет необходимых прав для просмотра вложений в этом сообщении.
-
AlexCrane
- Капитан
- Сообщения: 903
- Зарегистрирован: 20 окт 2017, 13:22
- Откуда: Ульяновск
- Имя: Александр
- Поблагодарили: 12 раз
Шаговый двигатель на GyverStepper
Центральные обмотки ШД никуда не нужно "цеплять", тогда будет работать как биполярный и будет работать с DM542. На библиотеке от Гайвера вполне реально на UNO выдать до 20000 шаг/сек если программа будет не очень сложная. Период прерывания убавь где-то до 30.LForest писал(а): 13 июн 2023, 18:22 Контроллер DM542 (микрошаг 400)
ШД NEMA 23HS6602 униполярный, но использую как биполярный. Вроде как центральные отводы обмоток надо на GND цеплять, но я не рискнул. И вообще не знаю, можно ли подключать униполярные к данному драйверу. В Вашем модуле ШД1_v1.3 есть варианты UNI, но в них управление идет через 4 пина, тогда как у драйвера только два управляющих PUL и DIR.
Скорость 8000. Подобрал ее на модуле ШД1_v1.3. Почему-то на модуле ШД AlexGrane GyverLIB уже после 3500 клинит, а на этом клинит после 8000. Может это уже ограничение Arduino Uno и надо взять мегу, к примеру?
Если честно даже этой скорости маловато, в иделе 25 об/с. Про биполярные написано, что их можно раскручивать до 1500 об/м.
Если не знаю, то не скажу. Если скажу, то сначала проверю...
Если нет возможности отблагодарить материально, хотя бы оцени пост....
Если нет возможности отблагодарить материально, хотя бы оцени пост....
Шаговый двигатель на GyverStepper
Ну так я про то и написал, что не "цепляю" центральные никуда, а использую только крайние контакты обмоток, потому ак у драйвера есть только B-B+A-A+.
Установил период прерываний на 30 в блоке на библиотеке Гайвера. MaxSpeed предельный 6000, выше клин. Но скорость побольше стала, чем в предыдущей попытке на AccelStepper.
При попытке установить еще меньше до 10, который указан минимальным в описании, вообще не запускается. В смысле вообще не реагирует на кнопку старта.
Установил период прерываний на 30 в блоке на библиотеке Гайвера. MaxSpeed предельный 6000, выше клин. Но скорость побольше стала, чем в предыдущей попытке на AccelStepper.
При попытке установить еще меньше до 10, который указан минимальным в описании, вообще не запускается. В смысле вообще не реагирует на кнопку старта.
Шаговый двигатель на GyverStepper
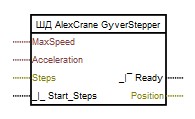
Попытался вот так реализовать алгоритм туда-сюда, но при компиляции ошибка. Так понимаю два блока нельзя использовать?
Если так, то я никак не пойму, каким образом я могу использовать выходы Ready и Position, если они всегда выполняются в конце программы. Так же я пытался передавать из Position в переменную, но, опять же, это не имеет смысла, потому как запись в нее происходит в конце работы блока и я не могу определить половину значения Steps, чтобы использовать ее.
Каким образом можно два раза задействовать этот блок?
Если так, то я никак не пойму, каким образом я могу использовать выходы Ready и Position, если они всегда выполняются в конце программы. Так же я пытался передавать из Position в переменную, но, опять же, это не имеет смысла, потому как запись в нее происходит в конце работы блока и я не могу определить половину значения Steps, чтобы использовать ее.
Каким образом можно два раза задействовать этот блок?
У вас нет необходимых прав для просмотра вложений в этом сообщении.
-
AlexCrane
- Капитан
- Сообщения: 903
- Зарегистрирован: 20 окт 2017, 13:22
- Откуда: Ульяновск
- Имя: Александр
- Поблагодарили: 12 раз
Шаговый двигатель на GyverStepper
Можно но это будет управление двумя независимыми ШД.
Чисто из-за спортивного интереса накидал ваш алгоритм.
[bbvideo]https://youtu.be/aCBkvbNIz8s[/bbvideo]
Если не знаю, то не скажу. Если скажу, то сначала проверю...
Если нет возможности отблагодарить материально, хотя бы оцени пост....
Если нет возможности отблагодарить материально, хотя бы оцени пост....
Шаговый двигатель на GyverStepper
Это не совсем мой алгоритм...
Если честно я уже реально удивляюсь. На разных форумах просил помочь и все мне показывают безконечное вращение туда-сюда, тогда как мне нужно делать один цикл туда-сюда с остановкой и ожиданием повторного запуска. Это даже видно из того алгоритма, что я пытался на двух блоках сделать выше.
Может у меня шиза и я слова путаю? 0_о Вот мой текст: - "У станка всего одна ось, по которой бегает голова с зеркалом и линзой от парковки до конца рабочей области в 2,5 метра, после чего сразу обратно до парковки. То есть один такой цикл туда-сюдашный, который запускается кнопкой "Старт"."
PS Если у меня уже после 6000 клинит, то может драйвер полудохлый или двигатель? Может такое быть? Питание я на него подаю 48 вольт при диапазоне драйвера 20-50. Должен тянуть максимальные... вроде как.
БР честный. Долго бегал по радиорынку с мультиметром, проверяя. Хотя у вас уно, а у меня нано. Может и правда унку нельзя так напрягать, хотя мозги у них одинаковые.
Если честно я уже реально удивляюсь. На разных форумах просил помочь и все мне показывают безконечное вращение туда-сюда, тогда как мне нужно делать один цикл туда-сюда с остановкой и ожиданием повторного запуска. Это даже видно из того алгоритма, что я пытался на двух блоках сделать выше.
Может у меня шиза и я слова путаю? 0_о Вот мой текст: - "У станка всего одна ось, по которой бегает голова с зеркалом и линзой от парковки до конца рабочей области в 2,5 метра, после чего сразу обратно до парковки. То есть один такой цикл туда-сюдашный, который запускается кнопкой "Старт"."
PS Если у меня уже после 6000 клинит, то может драйвер полудохлый или двигатель? Может такое быть? Питание я на него подаю 48 вольт при диапазоне драйвера 20-50. Должен тянуть максимальные... вроде как.
БР честный. Долго бегал по радиорынку с мультиметром, проверяя. Хотя у вас уно, а у меня нано. Может и правда унку нельзя так напрягать, хотя мозги у них одинаковые.
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и 1 гость