Пока ковыряюсь с железом, параллельно возникло желание допилить проект. А именно, внедрить в разработку блок разгона/торможения для ШД.
 1050 просмотров")
- Принципиальная схема
Но возникла коллизия.
Внедренный в модуль генератора MPG, данный блок - работает! Регулируется время нарастания и спада коэффициента деления генератора. Все бы ничего, но эта приблуда дружит только с джойстиком перемещений. Когда включается подача, идет плавный регулируемый разгон ШД. При нажатом джойстике двигатель вращается на выбранной скорости. При отпускании джойстика, двигатель плавно останавливается. Это почти идеально для режима "Подача". Недостаток - после отпускания джойстика, двигатель еще немного докатывает с торможением. Ведь никто, кроме оператора не знает, когда будет отпущен джойстик. Поэтому предусмотреть заранее торможение невозможно.Это как бы первый режим - предварительная проточка/фрезеровка/перемещение.
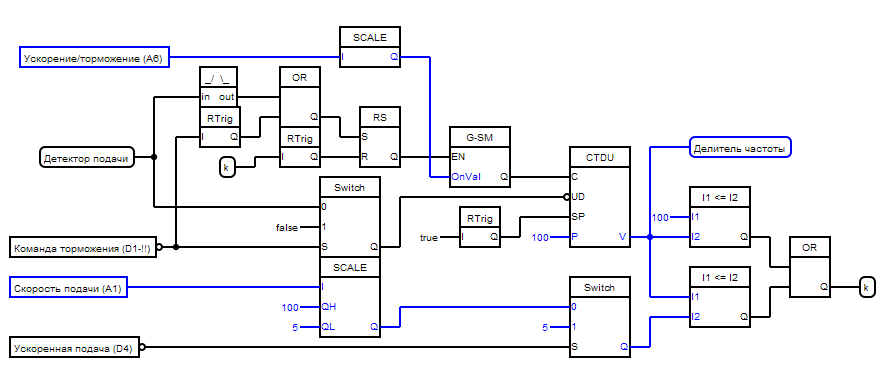
- Разгон-торможение MPG.bmp (994.55 КБ) 1050 просмотров
Второй режим - более точен. Он позволяет заранее выставить конечную точку и двигаться к ней не думая, когда остановиться двигатель. Вычислитель в модуле визуализации DRO дает команду на останов генератора. Количество шагов, необходимых для торможения двигателя, тоже устанавливается.

- Торможение DRO1.bmp (969.38 КБ) 1050 просмотров
И здесь возникает большое НО...
В модуле MPG идет регулировка скорости нарастания/спада (т.е. время), а в модуле DRO - количество шагов до остановки ШД (это примерно, что принести пару вёдер компрессии).
Во, напридумывал, что теперь не знаю, как с этим бороться!
Третий режим - передвижение с помощью энкодера. Этот режим совсем не приручается к разгону/торможению. А ведь при делителе энкодера "1,0", двигатель должен повернуться, как минимум, на 100 импульсов, а при различном пересчете редукции осей, может и на 800, а может и более. В генераторе, который я применяю (от Слимпера), делитель шагов на входе "Steps", а манипуляции энкодера на "StartSteps" и "Direction".
Посоветуйте, кто может, пожалуйста. Может уже наработаны какие то альтернативные решения?






